विज्ञापन
रिमोट नियंत्रित कारें मज़ेदार हैं, यकीन है, लेकिन स्वयं ड्राइविंग रोबोट कारें और भी मजेदार हैं। इस ट्यूटोरियल में, हम एक चार-पहिया रोबोट का निर्माण करेंगे जो चारों ओर ड्राइव कर सकता है और बाधाओं से बच सकता है। मैंने ख़रीदा यह पूरी 4WD किट AliExpress से, लेकिन आप आसानी से इनमें से अधिकांश घटकों को एक इलेक्ट्रॉनिक्स स्टोर से खरीद सकते हैं और इसे खुद एक साथ रख सकते हैं।
मैं आपको शुरू करने से पहले सभी निर्देशों को पढ़ने की सलाह देता हूं, क्योंकि इससे कुछ चीजें स्पष्ट हो जाएंगी जो पहली बार में भ्रमित हो सकती हैं। इसके अलावा, यह निर्देशों की लंबाई के कारण बहुत लंबी, उन्नत परियोजना की तरह लग सकता है, लेकिन यह वास्तव में बहुत सरल है। भयभीत होने की आवश्यकता नहीं है - यह एक शुरुआती स्तर की परियोजना है जिसके साथ आप कुछ संतोषजनक परिणाम प्राप्त कर सकते हैं, फिर इसे और अधिक सीखें। रोबोट की यह शैली पसंद नहीं है? यहाँ कुछ और है Arduino रोबोट 8 Arduino Robots आप $ 125 से कम में बना सकते हैंArduino बहुत कुछ कर सकता है, लेकिन क्या आप जानते हैं कि यह पूर्ण विकसित रोबोट बना सकता है। काफी सस्ते के लिए भी! अधिक पढ़ें आप आसानी से इसके बजाय निर्माण कर सकते हैं।
पैकेजिंग से सबकुछ लेने के बाद यहां हमारे पास क्या है:

आरंभ करने के लिए, हम चेसिस के निचले हिस्से में मोटर्स और एच ब्रिज (मोटर्स को पावर देने वाले कार्ड) को संलग्न करेंगे। सबसे पहले, दो लंबे बोल्ट और दो नट का उपयोग करके प्रत्येक मोटर को चार धातु कोष्ठक (वे आयताकार, धातु के ड्रिल किए गए ब्लॉक) संलग्न करें।
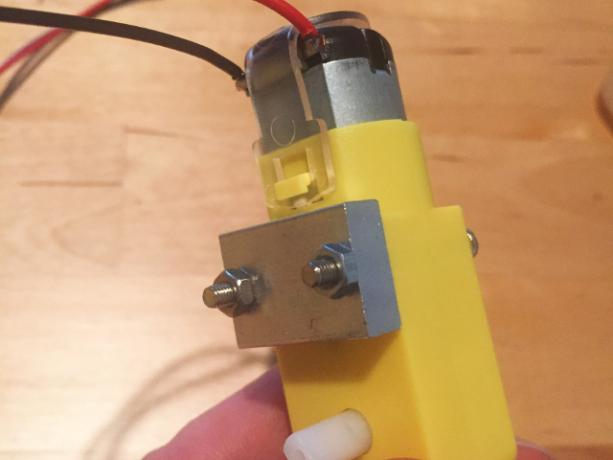
आपको यह सुनिश्चित करने की आवश्यकता होगी कि वे सही तरीके से संलग्न हैं, इसलिए नीचे दी गई छवि की जांच करें ताकि यह सुनिश्चित हो सके कि दो ड्रिल किए गए छेद वाले ब्लॉक का किनारा नीचे की ओर होगा। ध्यान दें कि प्रत्येक मोटर पर तारों चेसिस के केंद्र की ओर इशारा कर रहे हैं।

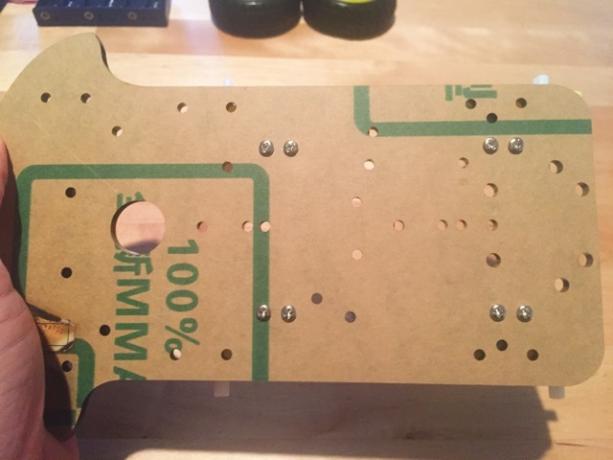
अब प्रत्येक मोटर को प्रत्येक धातु ब्रैकेट के तल में दो छोटे बोल्ट का उपयोग करके चेसिस से जोड़ा जा सकता है। यहाँ चेसिस के निचले भाग का एक दृश्य है ताकि आप देख सकें कि बोल्ट को कहाँ होना चाहिए:
अगला कदम चेसिस के लिए एच ब्रिज (मेरे किट में लाल बोर्ड) को सुरक्षित करना है। ऐसा करने से पहले आप सभी तार H ब्रिज से जुड़े होने तक इंतजार करना चाहते हैं, लेकिन यह आपके ऊपर है (मुझे यह आसान लग रहा था)। एक त्वरित नोट: मेरी किट कई फास्टनरों को याद कर रही थी, इसलिए मैंने पुल को सुरक्षित करने के लिए बिजली के टेप का उपयोग किया। हालाँकि, आप यहाँ देख सकते हैं कि बोल्ट और नट कहाँ गए होंगे:

अब जब एच पुल संलग्न हो गया है, तो आप बिजली की आपूर्ति शुरू कर सकते हैं। क्योंकि छह-एए बैटरी धारक डीसी एडेप्टर के साथ आता है, इसलिए आपको या तो अंत में कटौती करने की आवश्यकता होगी (जो मैंने किया था) या स्वयं बैटरी के लिए जम्पर तारों को चलाएं।

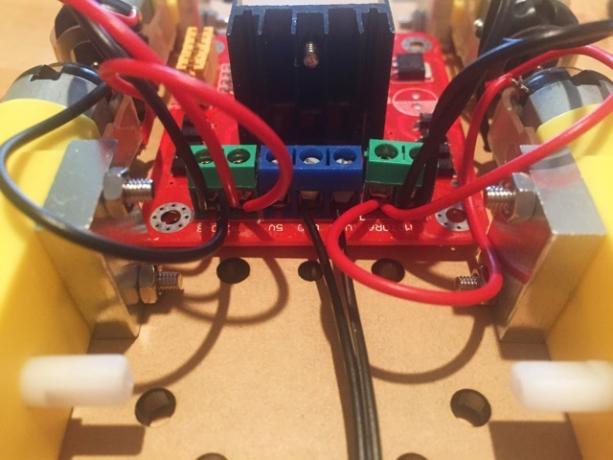
कोई फर्क नहीं पड़ता कि आप इसे करने का निर्णय कैसे लेते हैं, आप पुल पर पॉजिटिव वायर को "VMS" और नेगेटिव वायर को "GND" लेबल वाले ब्रिज पर चलाते हैं। फास्टनरों को पेंच करें और सुनिश्चित करें कि वे सुरक्षित हैं। फिर, आप मोटर तारों को जोड़ेंगे। दोनों किनारों पर, दो बंदरगाहों का एक सेट है; एक को "मोटर" और दूसरे को "मोटरबेल" कहा जाता है। दोनों हर तरफ लाल तारें सेंट्रोस्ट ग्रीन पोर्ट में जाएंगी, और दोनों काले तार सबसे बाहरी हिस्से में जाएंगे। इस चित्र को और अधिक स्पष्ट करना चाहिए:
मैंने पाया कि मुझे काम करने के लिए मोटर के तारों से कुछ हाउसिंग को उतारना पड़ा। अब जब आपके पास मोटरें हैं और बिजली की आपूर्ति पूरी हो गई है, तो मोटर ड्राइव शाफ्ट पर पहियों को स्लाइड करें, और स्थानों में चार तांबे के शाफ्ट नीचे दिए गए चित्र में दिखाएं (प्रत्येक तांबे के शाफ्ट को एक छोटे बोल्ट की आवश्यकता होती है)। यह रोबोट आकार लेना शुरू कर रहा है!

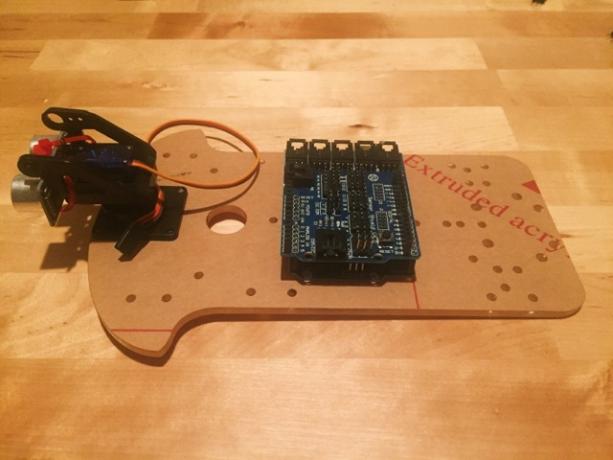
अब, चेसिस के उस हिस्से को एक तरफ सेट करें और दूसरे को पकड़ें जो शीर्ष पर बैठेगा। अगला कदम Arduino संलग्न करना है - फिर से, मुझे बिजली के टेप का उपयोग करना था, लेकिन आपको कुछ बोल्ट और नट्स के साथ बेहतर तरीके से आपका सुरक्षित होना चाहिए।

अगले चरण में माइक्रो सर्वो, ब्लैक क्रॉसपीस, सर्वो धारक (जिसमें तीन काले प्लास्टिक के टुकड़े होते हैं), और कुछ विशेष स्क्रू की आवश्यकता होती है। माइक्रो सर्वो के लिए काले क्रॉसपीस को संलग्न करने के लिए किट में बड़े तेज शिकंजा में से एक का उपयोग करें:
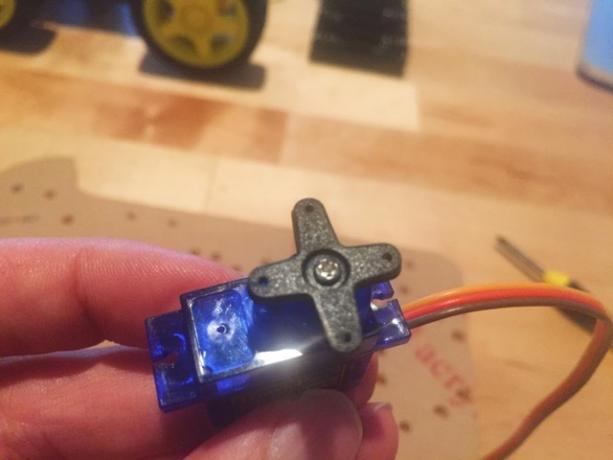
फिर धारक के ब्लैक प्लास्टिक रिंग में ऊपर की ओर फ्लिप करें। सुनिश्चित करें कि सर्वो से निकलने वाले तार उसी दिशा में सामना कर रहे हैं जो धारक के लंबे हिस्से के रूप में (फिर से, देखें) नीचे की छवि), और क्रॉसबार को सुरक्षित करने के लिए चार छोटे शिकंजा का उपयोग करें (धारक में चार छेद हैं जो छेद पर छेद के साथ संरेखित करें क्रॉसबार)।

इसके संलग्न होने के बाद यह कैसा दिखता है:
अंत में, सर्वो धारक के अन्य दो टुकड़े लें और उन्हें सर्वो पर स्नैप करें (साइड साइड में खांचे हैं जो सर्वो पर प्लास्टिक टैब से मेल खाते हैं)।

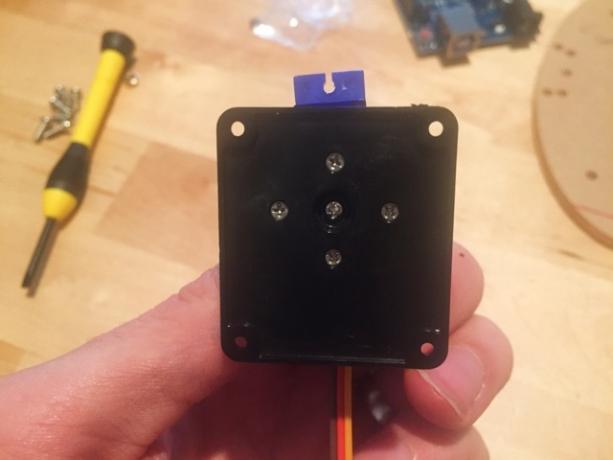
अब जब सर्वो धारक पूरा हो गया है, तो इसे चेसिस पर लगाया जा सकता है।

यहाँ बोल्ट कहाँ जाते हैं:

हमारे रोबोट को कुछ आँखें देने का समय है। दो ज़िप संबंधों का उपयोग करके सर्वो धारक को अल्ट्रासोनिक सेंसर संलग्न करें।

यदि आप उसी किट से काम कर रहे हैं जो मैं कर रहा हूँ, तो आपको एक Arduino सेंसर शील्ड प्राप्त होगी। हम इसे इस निर्माण में उपयोग नहीं कर रहे हैं, लेकिन आप इसे यूएनओ के शीर्ष पर पॉप कर सकते हैं यदि आप चाहते हैं (जैसा कि नीचे की छवि में है)। बस Arduino पर I / O पोर्ट के साथ ढाल के नीचे पिन को संरेखित करें और उन्हें कनेक्ट करने के लिए नीचे दबाएं। आपको इस समय इसकी आवश्यकता नहीं है, लेकिन ढाल काम में आ सकती हैं शीर्ष 4 Arduino ढालें अपनी परियोजनाओं के लिए महाशक्ति के लिएआपने एक Arduino स्टार्टर किट खरीदी है, आपने सभी बुनियादी गाइडों का पालन किया है, लेकिन अब आप एक ठोकर खा चुके हैं - आपको अपने इलेक्ट्रॉनिक्स सपने को साकार करने के लिए अधिक बिट्स और बॉब्स की आवश्यकता है। सौभाग्य से, यदि आपके पास ... अधिक पढ़ें .
आप सेंसर ढाल को कनेक्ट करते हैं या नहीं, अब आपको अल्ट्रासोनिक सेंसर को Arduino से कनेक्ट करने के लिए चार तारों की आवश्यकता होगी। सेंसर, VCC, GND, TRIG और ECHO पर चार पिन हैं। Arduino पर 5V पिन, GND से GND, और TRIG और ECHO से I / O पिन 12 और 13 पर VCC कनेक्ट करें।
अब चेसिस के निचले हिस्से को पकड़ें, और H ब्रिज के I / O पिन से छह जम्पर तारों को कनेक्ट करें (वे ENA, IN1, IN2, IN3, IN4, और ENB चिह्नित हैं)। ध्यान दें कि कौन से रंग के तार किन बंदरगाहों से जुड़े हैं, जैसा कि आपको बाद में जानना होगा।

अब इस चीज़ को एक साथ रखना शुरू करना है। चेसिस के ऊपरी भाग को पकड़ो और इसे निचले हिस्से से जुड़े तांबे के शाफ्ट के ऊपर सेट करें, और चेसिस के केंद्र में छेद के माध्यम से एच पुल से जुड़े तारों को खींचें। छह तारों को I / O पोर्ट से निम्नानुसार कनेक्ट करें:
- ENA से I / O पोर्ट 11
- ENB से I / O पोर्ट 10
- A1 से I / O पोर्ट 5
- A2 से I / O पोर्ट 6
- बी 1 से आई / ओ पोर्ट 4
- बी 2 से आई / ओ पोर्ट 3
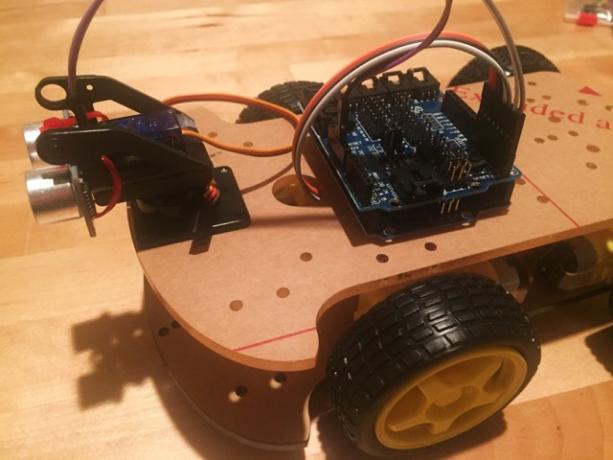
अब, चेसिस के ऊपरी भाग को तांबे के शाफ्ट में संलग्न करने के लिए चार छोटे शिकंजा का उपयोग करें। चेसिस के ऊपर छह-एए बैटरी धारक सेट करें (यदि आप कर सकते हैं तो इसे नीचे स्क्रू करें), 9V सेल धारक को Arduino में संलग्न करें, और यह बॉट रॉक करने के लिए तैयार है!

खैर, लगभग रॉक करने के लिए तैयार है। यह अभी तक पर्याप्त व्यक्तित्व नहीं है
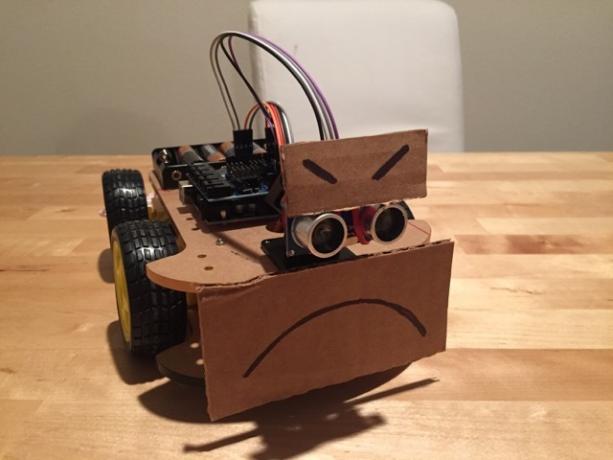
हम वहाँ चलें। अब इसे एक मस्तिष्क देने के लिए। चलो कुछ प्रोग्रामिंग करते हैं।
पहली चीज जो हम करते हैं वह यह सुनिश्चित करने के लिए परीक्षण है कि पुल और मोटर्स सही ढंग से झुके हुए हैं। यहाँ एक त्वरित स्केच है यह बॉट को आधे सेकंड के लिए आगे बढ़ने के लिए कहेगा, आधे सेकंड के लिए पीछे ड्राइव करेगा, फिर बाएं और दाएं मुड़ें:
यह एक साधारण परीक्षण के लिए बहुत सारे कोड हैं, लेकिन उन सभी कार्यों को परिभाषित करना बाद में आसान हो जाता है। (उनके लिए बिलवा का बड़ा आभार एच-पुल का उपयोग करने पर ब्लॉग पोस्ट इन कार्यों को परिभाषित करने के लिए।) यदि कुछ गलत हो गया है, तो अपने सभी कनेक्शनों की जांच करें और यह कि तार सही पिन से जुड़े हैं। यदि सब कुछ काम करता है, तो सेंसर परीक्षण पर आगे बढ़ने का समय है। अल्ट्रासोनिक सेंसर का उपयोग करने के लिए, आप चाहते हैं कि न्यूपिंग लाइब्रेरी डाउनलोड करें, और फिर उपयोग करें स्केच> लाइब्रेरी शामिल करें> .ZIP लाइब्रेरी जोड़ें ... पुस्तकालय लोड करने के लिए।

सुनिश्चित करें कि आप अपने स्केच के शीर्ष पर शामिल बयान को देखते हैं; यदि आप हिट नहीं करते हैं स्केच> लाइब्रेरी शामिल करें> न्यूपिंग. एक बार जब आप ऐसा कर लेते हैं, तो निम्नलिखित स्केच लोड करें:
स्केच अपलोड करें, और सीरियल मॉनिटर का उपयोग करके खोलें उपकरण> सीरियल मॉनिटर. आपको संख्याओं का तेजी से अपडेट होने वाला क्रम देखना चाहिए। अपना हाथ सेंसर के सामने रखें और देखें कि क्या वह नंबर बदलता है। अपने हाथ को अंदर और बाहर ले जाएं, और आपको यह मापना चाहिए कि सेंसर से आपका हाथ कितनी दूर है।

यदि सब कुछ सही ढंग से काम करता है, तो यह सब एक साथ रखने का समय है और इस चीज को चलने दें! यहां रोबोट के लिए कोड है अभी। जैसा कि आप शायद बता सकते हैं, यह मूल रूप से रोबोट के व्यवहार को नियंत्रित करने के लिए कथन के साथ जोड़े गए दो परीक्षण रेखाचित्र हैं। हमने इसे एक बहुत ही सरल बाधा-बचाव व्यवहार दिया है: यदि यह चार इंच से कम दूरी पर किसी चीज का पता लगाता है, तो यह बैकअप लेगा, बाएं मुड़ जाएगा, और फिर से चलना शुरू कर देगा। यहां कार्रवाई में बॉट का एक वीडियो है।
अपने रोबोट को कुछ जीवन दो
एक बार जब आप सही ढंग से काम करने वाले इस व्यवहार को प्राप्त कर लेते हैं, तो आप अधिक जटिल व्यवहार जोड़ सकते हैं; रोबोट को बाएं और दाएं मुड़ने के बीच वैकल्पिक करें, या यादृच्छिक रूप से चुनें; अगर यह किसी चीज के करीब हो जाए तो बजर को आवाज दें; बस, समर्थन के बजाय बारी; आप वास्तव में केवल अपनी कल्पना द्वारा सीमित हैं। आप अपने बारे में कुछ भी इस्तेमाल कर सकते हैं Arduino स्टार्टर किट क्या आपके Arduino स्टार्टर किट में है? [Arduino शुरुआती]इलेक्ट्रॉनिक घटकों से भरे बॉक्स के साथ सामना करना आसान है। यहां एक गाइड है जो आपको अपनी किट में मिलेगा। अधिक पढ़ें अधिक कार्यक्षमता जोड़ने के लिए। आप यह भी देखेंगे कि हमने अभी तक सर्वो के लिए कुछ भी कोडित नहीं किया है: आप वास्तव में अपने रोबोट की "आंखों" को आगे और पीछे कर सकते हैं। शायद जब भी वह सीधे सामने एक बाधा पाता है, तो केवल पीछे हटने के बजाय एक रास्ता तलाशने के लिए उनका उपयोग करना।
हमें बताएं कि क्या आप इस रोबोट या किसी अन्य को बनाने का निर्णय लेते हैं, और हमें बताएं कि आप इसके व्यवहार या रूप-रंग को कैसे अनुकूलित करते हैं। यदि आपके पास इस रोबोट के बारे में कोई प्रश्न हैं, तो उन्हें नीचे टिप्पणी में पोस्ट करें, और मैं देखूंगा कि क्या मैं मदद कर सकता हूं!
Dann एक कंटेंट स्ट्रैटेजी और मार्केटिंग कंसल्टेंट है, जो कंपनियों को डिमांड और लीड जेनरेट करने में मदद करता है। वह dannalbright.com पर रणनीति और सामग्री विपणन के बारे में भी ब्लॉग करता है।


